



KANDAI
HEADLINES

- RESEARCH
Giving groups of drones the intelligence to think and move on their own
Designing optimal routes and motion plans enabling groups of small drones to fly autonomously
/Kimiko Motonaka, Assistant Professor of the Faculty of Engineering Science
Drones are well-known for taking aerial photographs of beautiful mountain ranges and vast seas. Nowadays, they are commercially available at low prices, leading to an increase in drone hobbyists. At the same time, there are increasing expectations surrounding their potential as working robots in charge of more complex types of operations. Assistant Professor Motonaka researches the flight routes and motion plans of small indoor drones in particular. To help enable groups of drones to exchange information with each other as they fly autonomously, she works on designing control programs that essentially serve as the intelligence behind this goal.
I want to fly small indoor drones without a control tower.
In autumn of 2020, the United States Federal Aviation Administration made waves when they approved the use of mail-order drones for home delivery. When most people hear the word drone, their first thought is of outdoor aircraft that take aerial shots of natural or city scenery. Such drones are big enough to carry high-performance cameras and similar equipment, and they can be controlled relatively simply using GPS technology. That said, there are still few drones capable of automatic flight.
In response to the above, Assistant Professor Motonaka chose to focus her research on small indoor drones. "Outdoor drones are affected by the wind, but large aircraft carrying high-performance equipment can still be flown. That's not possible indoors where there are various limitations, including those related to size and reception." As she suggests, GPS radio waves generally cannot reach indoor locations. So there are few ways to determine where drones are located, which makes indoor flights difficult. At the same time, sensors and high-performance computers are too heavy to add to small aircraft, so people have no choice but to use separate computers to send instructions. In other words, hardware limits weigh heavily on small drones. But this headwind is precisely what motivates Assistant Professor Motonaka's research. "I think it would be interesting if we could equip drones with all the equipment they need to fly, thereby enabling them to move autonomously without a control tower."

Maximizing capabilities via multiple drones. Using the swarm intelligence of insect swarms as a hint.
Since small drones cannot carry high-performance computers, there are limits on what an individual drone can do. However, insect swarms provided a hint on resolving this issue. "As an example, although ants are individually weak, a group of them can carry a heavy load. Similarly, even if the specs of individual drones are somewhat low, the idea of swarm intelligence implies that flying many drones together could give them real power, and this was the starting point of my current research." This research even led to the discovery of certain advantages that were not shared by large drones with superior performance flying in isolation. For example, when there is an accident, it is important to search areas not accessible to people and find damage as quickly as possible. "If you deploy many drones, you can cover a wider field of view than when using only one drone, which helps you figure things out more quickly. This approach also offers peace of mind, because it is okay even if two or three drones happen to malfunction."
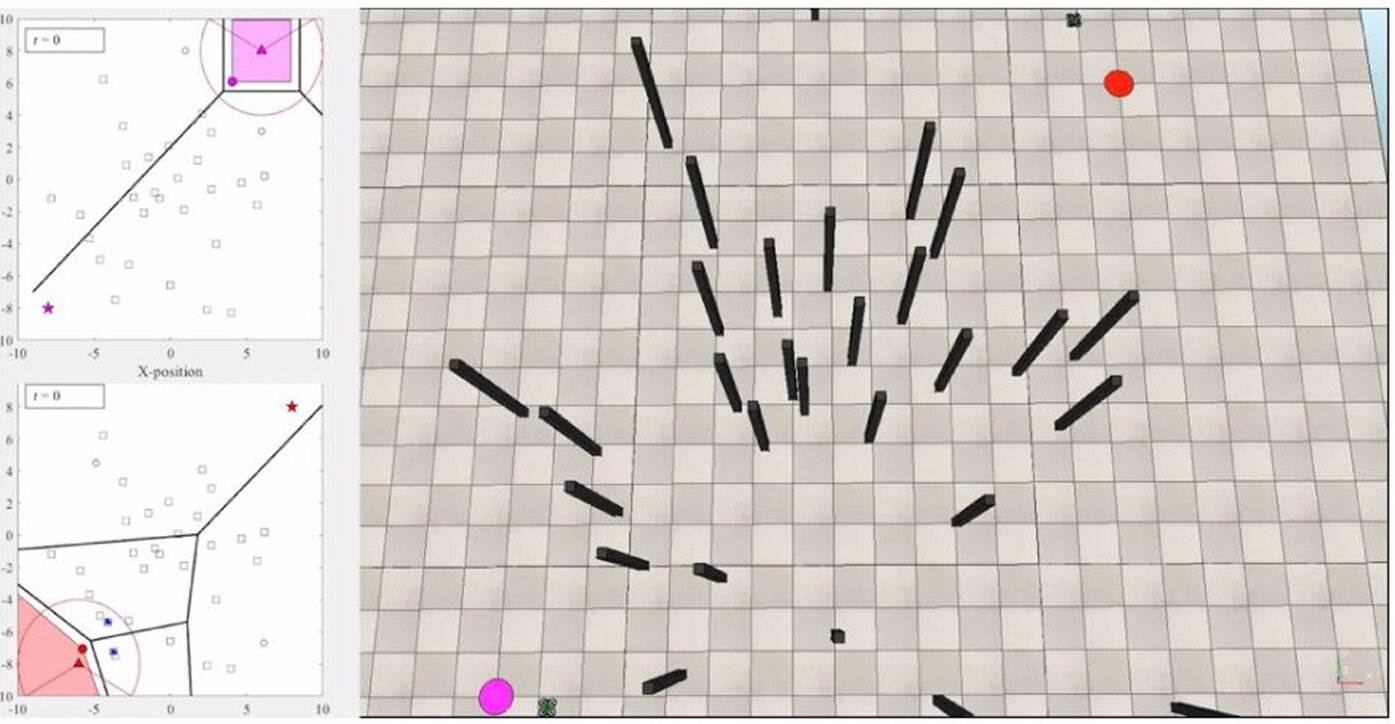
Assistant Professor Motonaka is currently working on various simulations aimed at ensuring that a group of drones can reach their destination. For example, she has confirmed that ─ by repeatedly using a Voronoi diagram to determine the proper flying directions and cells where drones can fly safely ─ drones can reach their destination without colliding with each other. In addition, even in cases where each drone can only obtain information on nearby drones and obstacles, which means that individual drones cannot see the entire group or overall environment, she has verified an algorithm enabling the drones to continuously fly as a group while avoiding collisions. She has also successfully run a numerical simulation in which drones that get stuck in one place for a certain period of time due to obstacles temporarily change their target destination and take a detour to proceed.

Simulations and actual drone experiments aimed at achieving drones that think for themselves
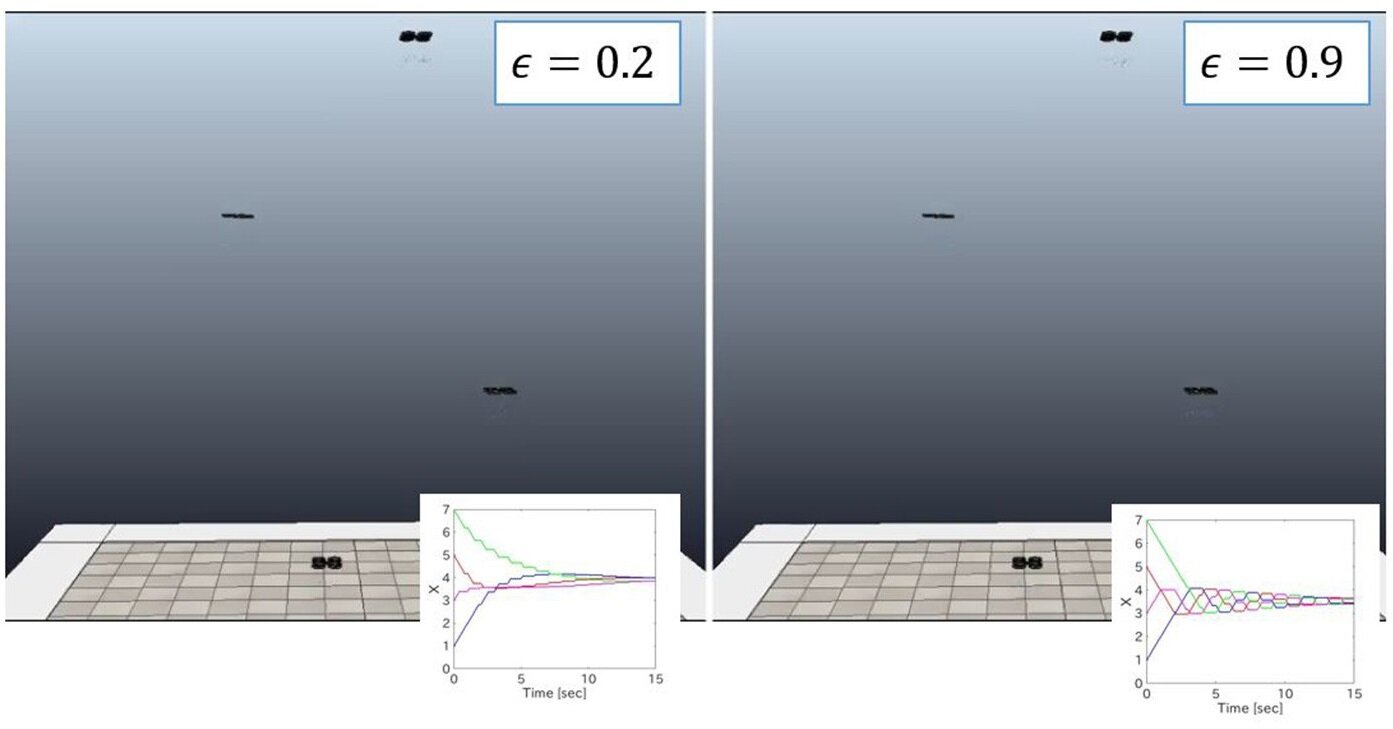
Assistant Professor Motonaka's goal is to achieve drones that can measure their distance from nearby drones and can adjust how far they need to move to attain the same altitude or line up with other drones. Such drones would be able to autonomously move based on the data and information of other drones in the group or follow the group leader without any instructions from a control tower. In other words, such drones would be able to think for themselves and move accordingly. "A drone might move based on its judgment of where there is space to do so, or pass by a room that has already been searched based on information received from other drones. The idea is for every drone to move like this on its own. Ultimately, I hope that we will be able to achieve movement that is almost human-like." Although this situation seems like a scene from a science fiction movie, she is confident that such usage is possible based on her simulations.
Assistant Professor Motonaka is also focusing on demonstration experiments using actual drones. However, there are basic hardware problems, which are acting as a bottleneck. For example, depending on the communication situation, sensor data is not always available when it needs to be, and the processing speed is sometimes too slow. "To get a drone to judge how it should move every second, the calculation processing for determining a course of action based on information on the surrounding environment must be finished within a second. However, the small computers available for use with small drones sometimes lack the necessary processing speed. Therefore, as I continue my experiments, I am trying to come up with more ways to reduce the number of necessary calculations in line with the hardware."
Drones are evolving thanks to intelligence generated by new ideas
The range of applications for indoor drones will soon expand to encompass transport, searching, rescuing, and similar tasks. "Drones could be used to fly along complex pipes in factories, inspecting them for cracks. They could likely play a role as mobile surveillance cameras that regularly patrol commercial facilities and warehouses. One day, we might even be able to use them to pursue suspicious objects."
Assistant Professor Motonaka says that she wants to deepen her research of wide-area searches under complex conditions, aiming to equip drones with more evolved forms of intelligence. To accomplish this, it is necessary to consider both the processing of data from sensors and enhanced intelligence via machine learning, fields that are linked to Kansai University's institution-wide Data Science Program. Based on her research, Assistant Professor Motonaka gives lectures on AI applications for drones as part of basic courses of all 13 faculties, which are handled relay-style by different teachers.
She has been involved in research and education at Kansai University for six years. "I think it's a wonderful environment. There is a comprehensive lineup of equipment, and both faculty and students can freely use the software necessary for research." She says she conducts research alongside students who are "diverse, unique, honest, and hardworking." "I constantly run into walls during my research. To me, research means giving form to new ideas and things once only imagined. It's tough, but that's exactly what makes it fun." Motivated by her dreams, she hopes to continue striving to help achieve a world in which drones are equipped with intelligence not yet available to society so that they can help in a wide variety of situations.

Related articles
-
Studying Creole Culture in Cabo Verde, an African Island Nation...
RESEARCH

-
Japanese Animation Crosses Borders
RESEARCH
-
The World of Atoms and Molecules with the supercomputer Fugaku...
RESEARCH
-
Helping children visiting the Expo experience the joy and learnin...
RESEARCH
-
Magnetic Memory Development Based on New Physical Phenomena...
RESEARCH
-
Developing Communities to Extend Healthy Life Expectancy by Lever...
RESEARCH
- TOP
- About Kansai University
- Public Relations
- List of Headlines
- Headline Article