用途・応用分野
○土木構造物の健全性点検
○有事の際の危険箇所の探索、要救助者の探索
○ドローンやロボットによる集団協調的搬送作業
○有事の際の危険箇所の探索、要救助者の探索
○ドローンやロボットによる集団協調的搬送作業
概要
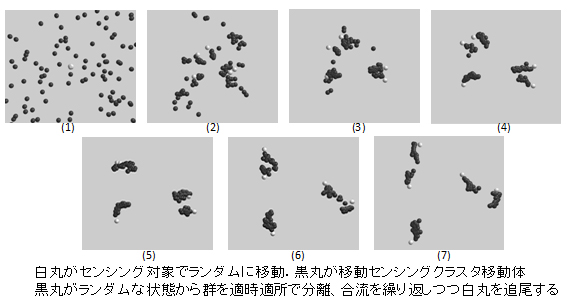
センシング対象物の位置、数、所在範囲不明、または移動する」未知で変動する環境において、複数の自律移動体が群を構成し集団での探索行動を創発させるために、群知能メカニズムPSO(Particle Swarm Optimization: 粒子群最適化)を次のように拡張適用する。
○複数の自律移動体間の相互作用に無線通信を適用し、局所的な相互作用のみで全体系の振る舞いを創発される
○PSOに群分離メカニズムを加えて、複数の群を動的に構成可能とし、複数群の並列探索を可能とする
○PSOに継続探索メカニズムを加えて、複数の対象物を逐次的に探索可能とする
上記は「研究・技術シーズ集」より抜粋した内容です。詳細につきましては「研究・技術シーズ集一覧」よりご確認ください。





{kind=link}